Collaborative Pedestrian Tracking
| Team: | U. Nguyen, C. Heipke |
| Year: | 2016 |
| Funding: | Deutsche Forschungsgemeinschaft (DFG) |
| Duration: | 01.12.2016 – 01.12.2019 |
| Is Finished: | yes |
Project Description
Pedestrians are one of the most relevant objects to be tracked, motivated among others by the development of applications related to traffic safety, and robotics, etc. Tracking them allows vehicles and robotics not only to know where pedestrians appear but also to anticipate their moving directions and behaviors, which are crucial factors for planning their moving paths and safe navigation. Therefore, the focus of this study is to develop a pedestrian detection and tracking system with high reliability and accuracy.
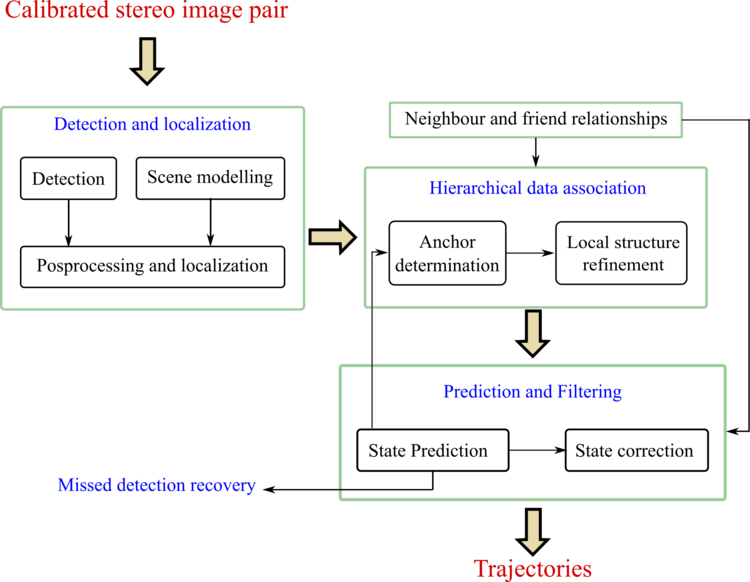
Following the state-of-the-art tracking-by-detection approach, the tracking task is decomposed into two main stages: objects are approximately located in every image frame in the detection step; then, detections in consecutive images are associated w.r.t each other in data association. To achieve our research objectives, several contributions have been made in this project, which are detailed in the next paragraphs.
A multi-person tracking framework is proposed to track pedestrians in world coordinates by employing both 2D images and 3D stereoscopic information. Stereo images are used to model the scene and estimate pedestrian positions in 3D object space. The appearances of pedestrians in image space are utilized for detection and spatial-temporal feature comparison. In addition, an approach is introduced to reliably estimate and assess the motion of pedestrians so that missed detections can be retrieved using their trajectory information. In order to improve the identification accuracy of tracked targets, we develop a hierarchical association by employing geometry structure in 3D space among nearby people. The assignment optimization is divided into two steps: (1) determining trajectories whose assignments are strongly believed to be correct, which we call anchors and (2) employing geometry constraints between the anchors and their nearby trajectories in 3D-space to correct the matching of unreliable assignments in the first step. Moreover, the tracking-confirmed-detection approach is suggested to cope with the problem of noisy detection results so that we can obtain high recall and small false alarm values of detections during tracking. Specifically, while employing all detections of the current frame as input for the assignment, solely highly accurately detected pedestrians are used to create new trajectories.
Experimental results on the Kitti tracking benchmark show that our tracker yields comparable results to other state-of-the-art methods with MOTA of 54.00, which is the best online result among all investigated approaches, MOTP of 73.03, which is the best of all reported values, and MT of 29.55, being the second-best result. This confirms the effectiveness of our proposed methods.
Overall research project: “Integrity and Collaboration in Dynamic Sensor Networks” (i.c.sens)
This project is part of the international Research Training Group “i.c.sens” (https://www.icsens.uni-hannover.de). The aim of the Research Training Group is to investigate concepts for ensuring the integrity of collaborative systems in dynamic sensor networks.





